Precise Time-Domain Simulation of High-Order LTI Systems
When dealing with high-order systems (especially those between 12th and 20th order or higher), standard State-Space (SS) or Transfer Function (TF) models often suffer from numerical instability, leading to divergence or noise. If only the input-output response is required, the most robust approach is to discretize the system using Poles and Zeros directly and execute it using Second-Order Sections (SOS), bypassing polynomials and large matrices.
1 Principles of High-Precision Simulation
Elimination of Polynomials (TF): Polynomial coefficients increase exponentially with the system order, making numerical precision loss (underflow/overflow) inevitable in high-order systems.
Limits of Matrix (SS) Operations: Beyond the 12th order, matrix operations like discretization (c2d) or pole extraction (ss2zpk) begin to accumulate significant numerical errors.
Direct Tustin Transformation (Bilinear): Mapping continuous-time poles and zeros individually to the discrete-time \(z\)-plane completely avoids the risk of conditioning issues associated with large-scale matrix computations.
2 Implementation Code for Comparative Validation
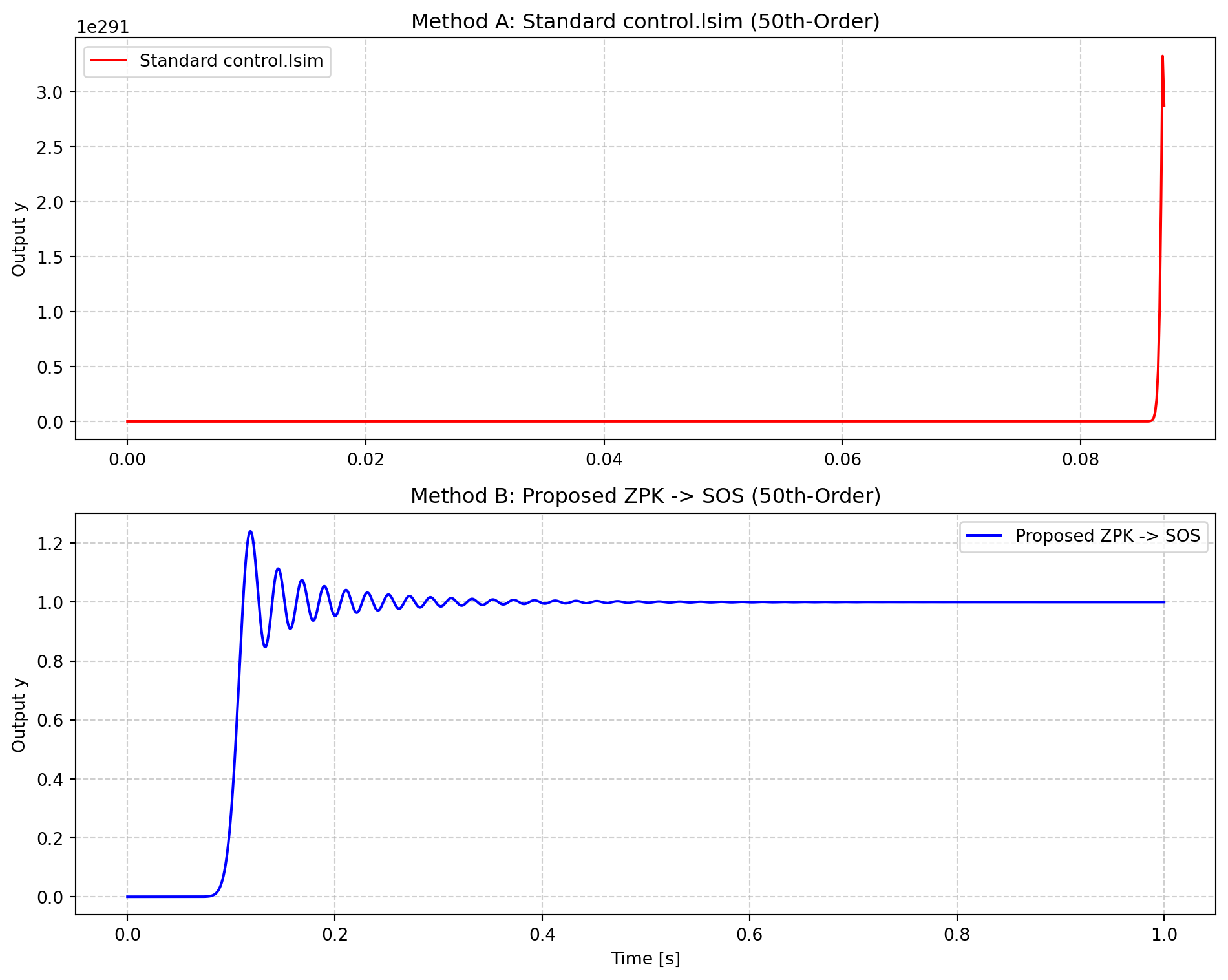
This code compares the standard control.matlab.lsim with the high-precision ZPK -> SOS (Direct Mapping Method).
import numpy as npfrom scipy import signalimport controlimport control.matlab as matlabimport matplotlib.pyplot as pltimport warningswarnings.filterwarnings('ignore')# --- 1. Configuration Parameters ---dt =125E-6order =50fc =50duration =1.0# --- 2. Generate Continuous-Time Model (ZPK Format) ---# Example: Butterworth filter (representative of stable high-order systems)z_c, p_c, k_c = signal.butter(order, 2* np.pi * fc, analog=True, output='zpk')# --- 3. Method A: Standard control.matlab.lsim ---# Create continuous-time TF modelT_zpk_cont = control.zpk(z_c, p_c, k_c)T_tf_cont = control.tf(T_zpk_cont)T_tf_dist = control.c2d(T_tf_cont, dt, method="tustin")t = np.arange(0, duration, dt)u = np.ones_like(t)# Standard solvers can be prone to small oscillations or deviations in high-order systemsy_lsim, t_lsim, xout = matlab.lsim(T_tf_dist, U=u, T=t)# --- 4. Method B: High-Precision ZPK -> SOS (Direct Mapping Method) ---# (1) Direct Tustin transformation (bilinear) of poles and zeros without matrix conversion# Avoiding matrix operations prevents numerical errors by mapping points directly on the complex planez_d, p_d, k_d = signal.bilinear_zpk(z_c, p_c, k_c, fs=1/dt)# (2) Convert to SOS format (Optimal pairing)sos = signal.zpk2sos(z_d, p_d, k_d)# (3) Execute filteringy_sos = signal.sosfilt(sos, u)# --- 5. Plotting Results ---plt.figure(figsize=(10, 8))# Upper plot: control.lsimplt.subplot(2, 1, 1)plt.plot(t_lsim, y_lsim, color='red', label='Standard control.lsim', lw=1.5)plt.title(f'Method A: Standard control.lsim ({order}th-Order)', fontsize=12)plt.ylabel('Output y')plt.grid(True, linestyle='--', alpha=0.6)plt.legend()# Lower plot: ZPK -> SOS (Proposed)plt.subplot(2, 1, 2)plt.plot(t, y_sos, color='blue', label='Proposed ZPK -> SOS', lw=1.5)plt.title(f'Method B: Proposed ZPK -> SOS ({order}th-Order)', fontsize=12)plt.xlabel('Time [s]')plt.ylabel('Output y')plt.grid(True, linestyle='--', alpha=0.6)plt.legend()plt.tight_layout()plt.show()
3 Comparison of Methods
Method
Recommended Order
Characteristics of Precision and Stability
TF (lsim)
Up to 5th
Quickly fails in high-order systems due to polynomial coefficient explosion.
SS (lsim)
Up to 10th
Requires matrix balancing. Errors become noticeable beyond the 12th order.
SS -> SOS
Up to 12th
Dependent on matrix pole extraction accuracy. Crosses the “8th-order barrier.”
ZPK -> SOS
over 50th
Handles poles and zeros directly; remains stable even for 100th+ order systems.
4 Conclusion
For input-output response analysis, the ultimate solution in Python is to “build and couple models in State-Space,”“extract Poles and Zeros (ZPK),” and then “convert directly to SOS via Bilinear transformation.”
This workflow effectively eliminates numerical divergence and artificial artifacts that typically plague lsim in high-order scenarios.